



トレンド
NexTech Week Japan 2026参加レポート ~デジタルツイン・フィジカルAI実装の最前線~
2026.06.19

GPUエンジニア
齋木 悠友

1. はじめに
こんにちは、NTTPCコミュニケーションズの齋木です。
普段はGPUサーバーやその関連機器の設計・構築を担当しています。
このたび、東京ビッグサイトで開催された「NexTech Week Japan 2026 春」に参加しました。本イベントは、AI、ブロックチェーン、量子コンピューター、ヒューマノイドロボットなど、最先端テクノロジーが一堂に会する展示会です。
AI・ロボティクス技術の進化に加え、それらを社会実装・事業化するための基盤技術や人材育成の観点からも、多くの企業・研究者が集う場となりました。
本記事では、会場での講演や展示を通じて見えてきたヒューマノイドロボットの将来像と、デジタルツイン/フィジカルAI 活用の最新潮流について紹介します。
特に今回は、ロボット本体の性能や完成度というよりも、それを支えるデータ基盤やデジタルツインの重要性がより明確に打ち出されていた点が印象的でした。
2. 講演
(1) 川崎重工業株式会社(国産ヒューマノイドの将来展望)
本講演では、まず各国におけるヒューマノイド開発の動向が共有されました。
特に中国では、140社以上のメーカーが参入する巨大な市場が形成されている一方で、現状はパフォーマンスや運動性能の訴求が先行しており、実運用レベルでの社会実装には課題が残る状況が示されました。
自動車メーカーのショールームにおけるボックス搬送デモなど、産業応用の試みも見られるものの、現場適用という観点では発展途上にあることが強調されていました。
また、音声指示による物体把持など、AIを活用したインタラクション技術も紹介され、音声理解とカメラ認識を組み合わせたヒューマノイド制御や、「一脳多能」「一脳多機」を実現する汎用型エンボディードAIプラットフォームの取り組みが、国外での注目事例として挙げられました。
参考:慧思開物(Huisi Kaiwu)
https://japanese.beijing.gov.cn/beijinginfo/sci/latesttrends/202503/t20250314_4035078.html
川崎重工の取り組み
こうした海外動向を踏まえたうえで、川崎重工が描く将来像として示されたのが、単体ロボットの高度化にとどまらない、ロボットが連携する社会の構想です。
産業ロボット、サービスロボット、ヒューマノイドがそれぞれ独立して存在するのではなく、複数のロボットがネットワークでつながり、フィールドや用途に応じて役割分担しながら機能する世界を目指しています。
講演では、ロボットの特性についても整理がなされていました。
従来の産業ロボットは、限られた空間の中で高速かつ高精度に動作することを得意としてきました。
一方で、ソーシャルロボットは、想定外の状況にも対応しながら作業を完遂することが求められ、より柔軟で多様なタスク処理能力が必要とされます。ソーシャルロボットの例として下記のような事例が挙げられました。
医療・介護分野におけるロボット社会実装の事例
医療・介護分野における社会実装の事例として、屋内配送用サービスロボット「FORRO」と看護師補助ロボット「Nurabot」を連携させ、臨床検体の配送から検査機器への投入までを自動化する取り組みが紹介されました。
これらのロボットは、NVIDIA Omniverse™ を活用したデジタルツイン環境上で病院内の移動やアーム動作を事前に検証し、その結果を実機に反映することで、シミュレーションと実運用を往復しながら精度を高めていく、Sim-to-Real を前提とした開発が行われています。
CORLEO(コルレオ)
オフロードパーソナルモビリティ「CORLEO」では、水素エンジンとロボティクス技術を融合した新しい移動体のコンセプトが示されました。
4脚構造による高い悪路走破性に加え、モーターサイクル技術を応用した安定性や操作性を備えており、重心移動による直感的な操縦を可能とするなど、山岳地や水辺といった従来のモビリティでは対応が難しい環境での活用が想定されています。また、水素を燃料とする発電機構を採用している点も特徴的であり、将来的な現場利用を見据えた取り組みといえます。
現在はコンセプト段階であり、2035年を目途に市販化が想定されています。
中国などのロボティクス競争を背景にヒューマノイドとの差別化が意識されており、人の移動支援を中心としながら、不整地環境での活用など実用的な価値の提供に主眼が置かれている点が印象的でした。
参考:
https://www.khi.co.jp/pressrelease/detail/20251203_1.html
(2) NVIDIA(フィジカルAIがもたらす変化と今後の展望)
NVIDIAの講演では、GTC 2026の振り返りを兼ねて、ヒューマノイドおよびPhysical AIを支える主要技術が紹介されました。中でも注目されたのが、「Isaac GR00T」と、Agentic AI向けの基盤である「OpenClaw」「NeMoClaw」「OpenShell」です。
Isaac GR00T
◆ヒューマノイド基盤モデル「Isaac GR00T」
まず紹介されたのが、ヒューマノイド向けの汎用ロボット基盤モデル「Isaac GR00T」です。
Vision-Language-Action(VLA)モデルとして、人の指示理解から行動生成までを一貫して扱える点が特徴であり、ロボットの汎用化を支える中核技術と位置付けられています。
現在は研究用途を主としたモデルに加え、商用利用を前提としたモデルも登場しており、ヒューマノイドの実用化に向けた基盤整備が進みつつあります。
Isaac GR00Tは、下記2つのバージョンが発表されています。
- GR00T N1.6:
- 現在利用可能なバージョン
- オープンソース形式で、GitHub / Hugging Face で公開済み
- 研究・PoC・評価用途を主目的とした 非商用前提のライセンス
- GR00T N1.7:
- 商用利用可能なモデル
- 現在はEarly Access段階で、一般提供(GA)は2026年度中を想定
OpenClaw / NeMoClaw / OpenShell
◆Agentic AI基盤「OpenClaw」
一方でソフトウェア基盤として注目されているのが「OpenClaw」です。
これは、AIエージェントが推論・計画・実行を行うための共通基盤であり“Agentic AIにおけるLinux”とも位置付けられています。
ファイル操作やAPI実行などを統合的に扱える強力な基盤である一方で、その自由度の高さから、セキュリティやガバナンスの観点での課題も指摘されています。
◆エンタープライズ利用を支える「NeMoClaw」と「OpenShell」
こうした課題に対応するために登場したのが「NeMoClaw」と「OpenShell」です。
NeMoClawは、OpenClawをエンタープライズ用途で安全に活用するための公式スタックであり、ポリシーベース制御や権限制御などを提供します。
また、OpenShellは自律AIエージェントを安全に実行するためのランタイムであり、サンドボックスによる制御を通じて、既存エージェントを大きく改修することなく安全性を確保できる点が特徴です。
◆技術構成の整理
これらの関係性は以下のように整理できます。
- OpenClaw:エージェント基盤
- NeMoClaw:エンタープライズ向け制御・構成
- OpenShell:実行環境(セキュリティの中核)
すなわち、OpenShellが実行制御の中核を担い、その上でNeMoClawが構成を補完し、OpenClawがエージェントとして機能する構造となっています。
<関係イメージ>

AIによる生成
(3) 株式会社APTO(ロボティクス領域で最も重要な"データ"の作成方法について)
株式会社APTO(以下、APTO)は、本イベントの中で個人的に注目していた講演の一つです。AI開発における最大のボトルネックとされる「データの設計・収集・品質・評価」を独立した事業として展開しています。 NTTPCの共創パートナープログラム 「Innovation LAB」 のパートナー企業でもあります。
参考:Innovation LAB-NTTPCの共創パートナープログラム
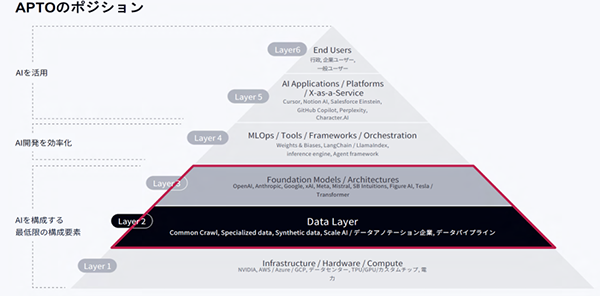
◆APTOの位置づけ
NexTech Week Japanでは、APTOが「ヒューマノイド/ロボティクス開発におけるデータ取得・品質管理のボトルネック」を正面から扱うプレイヤーとして位置づけられていた点が印象的でした。
APTOは、画像AI分野で培った 教師データ作成・アノテーション・品質管理の知見を、ロボティクス領域、とりわけ フィジカルAIに応用している点を強く打ち出していました。
講演資料より抜粋
◆事業内容
データ設計・構築からモデル開発・R&Dに取り組んでおり、独自の日本語データセットを用いたファインチューニングにより、LLMの基礎研究において大幅な性能向上を実現されています。

講演資料より抜粋

講演資料より抜粋
◆取り組み内容
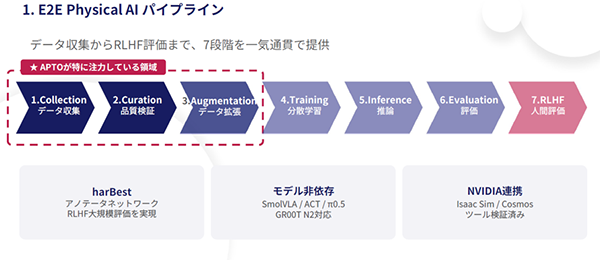
講演資料より抜粋
◆データ収集環境

講演資料より抜粋
上記のとおり、複数のロボティクス機材(OpenArmやMobile Manipulator等)を用いたデータ収集環境が整備されており、学習プロセスにおける課題についても具体的に整理できるレベルで検証が進められています。
APTOは、フィジカルAI開発において最大の課題とされる「学習データの品質・量・評価」を一気通貫で取り扱える点を大きな強みとしており、ロボットAIの基盤を支えるインフラ事業者として、非常に戦略的かつ重要なポジションにあると感じました。
GTC 2026でも、フィジカルAIの応用実装に向けた取り組み状況が発表されました。ぜひ下記URLよりご覧ください。
参考:NVIDIA サービスを活用し、LLM の精度向上からフィジカル AI への応用について S81964 | GTC San Jose 2026 | NVIDIA On-Demand
3. 展示ブース
リョーサン菱洋株式会社: 人の操作データを起点としたロボット知能化アプローチ
◆トラッカーでロボットアームを操作可能な実機デモ
展示ブースでは、トラッカーにより来場者がロボットアームを操作できる実機デモが展示されていました。来場者が操作体験したデータを模倣学習に活用する取り組みが紹介されており、現場データ収集とAI学習を一体化した実践的なアプローチが印象的でした。

NTTPC社員撮影
◆5指ロボットハンド
協働ロボットに5指ロボットハンドを組み合わせたマシンが展示されていました。遠隔地から人間がグローブをはめて操作することができる仕組みになっており、5本の指をなめらかかつ直観的に動かすことができます。
さらに、操作データは模範学習の学習データに活用されます。強化学習と組み合わせることで現場の作業員の繊細な動きや判断ポイントをAIに取り込むことができ、ロボットの自律的な判断・動作に役立てられます。
◆Isaac Simを使ったロボットシミュレーション
NVIDIAが提供しているアセットを利用し、強化学習により階段などの地形における歩行動作を最適化するシミュレーションが展示されていました。試行錯誤を繰り返しながら、徐々に滑らかな歩行へと近づけていく様子が確認できました。
このように、物理環境をデジタル上で再現し、実機投入前に学習・検証を行うことで、開発効率の向上やリスク低減につなげようという試みが特徴的でした。特にヒューマノイドのように動作の自由度が高いロボットにおいては、Sim-to-Real を前提としたシミュレーションの重要性が今後さらに高まっていくと感じられました。
トロン株式会社:データセンター内の設備をデジタルツインで再現
本デモでは、データセンター設備を高精度にデジタルツイン化することで、設計・運用・保守における意思決定を事前に仮想空間上で検証できる点が大きな特徴として示されていました。
具体的には、機器の搬入可否を事前に確認する機能や、通路や開口部の高さ・幅といった制約条件の可視化、さらにはロボットの自己位置推定と環境認識の統合など、実運用で発生する課題を事前に再現・評価できる仕組みが整備されています。
これらの機能からは、単なる3D可視化にとどまらず、物理空間における制約や作業プロセスを含めたシミュレーション基盤としてデジタルツインが活用されている点が重要であると感じられました。
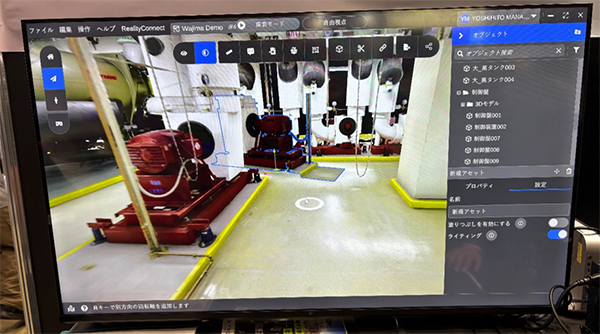
搬入したい箇所に機器を設置できるかシミュレーションする機能(NTTPC社員撮影)
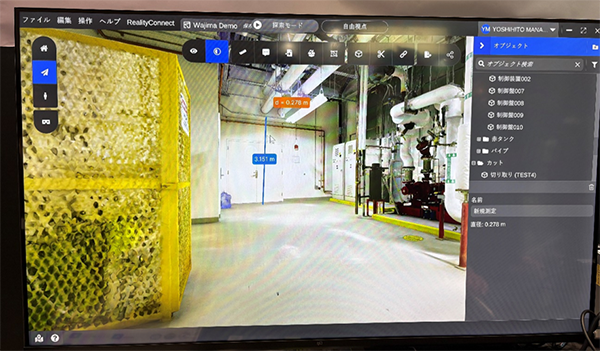
搬入の障壁となる障害物のサイズを計測できる機能(NTTPC社員撮影)
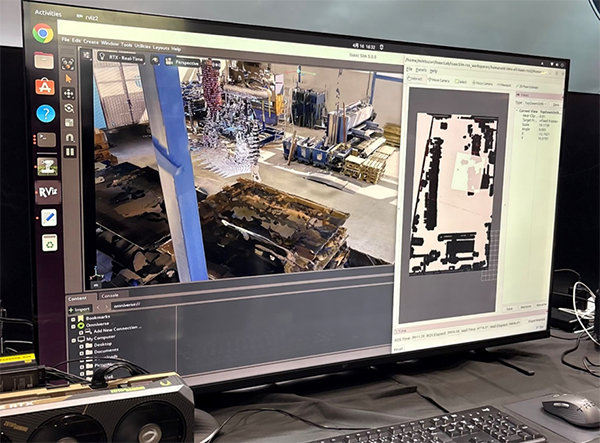
データセンター内で稼働するロボットの自己位置推定+環境認識を行う機能(NTTPC社員撮影)
特にデータセンターのように設備密度が高く、搬入・設置・保守に制約が多い環境においては、事前検証によるリスク低減や作業効率化の効果が大きく、ロボティクスとの連携によってさらなる自動化・高度化が期待される領域であると考えられます。
株式会社アスク:NVIDIA VSS を活用したAIビデオ分析のデモ
アスクのブースでは、NVIDIA VSS を活用したAIビデオ分析のデモが展示されていました。カメラ映像から人物の検出や行動把握を行い、その場の状況をリアルタイムに可視化する内容となっていました。
特徴的だったのは、単に映像解析するだけでなく、分析した結果をAIが自然言語に変換し、音声でも読み上げる点です。これにより、「映像を人が見て判断する」従来の運用から、AIが状況を理解し、その内容をそのまま人に伝える形へと進化していることが感じられました。
このような仕組みは、監視用途に加え、現場オペレーション支援などにもつながる可能性があり、映像分析が「理解・説明まで含めたインターフェース」へと発展している印象を受けました。

NTTPC社員撮影
Galbot:ヒューマノイドドリンクステーション
会場では、ヒューマノイドロボットによるドリンク提供デモが展示されており、配布されているドリンクチケットを提示すると、指定した飲み物を運搬してくれる仕組みとなっていました。

NTTPC社員撮影
全体的に非常に高い精度で作業が行われており、ヒューマノイドによる実運用が現実的な段階に近づいていることを感じさせる内容でした。
また、イベント中も継続的に学習させている様子が見られ、精度向上に向けたフィードバックループが実際の運用の中で回されている点が印象的でした。
4. 総括
私が本イベントに参加するのは2回目です。前回参加した2025年度秋の NexTech Week Japan ではロボットそのものが主役であったのに対し、今回の展示では デジタルツインの存在感が増していた点が印象的でした。
展示全体を通じて見られた共通潮流として、センサー情報を活用した環境・動作のデジタルツイン化、模倣学習・強化学習を前提としたデータ取得設計、そして Sim-to-Real を強く意識した Isaac Simの活用が挙げられます。
これらは、単体ロボットの性能や完成度を示すデモというよりも、「データ → 学習 → 検証 → 実機」までを一貫してつなぐ基盤をいかに構築するかに各社の主眼が移っていることを示しています。
その背景として、ロボット・フィジカルAI 領域における競争軸が、「ロボットを動かせるかどうか」から「ロボットを継続的に学習させ、現場適応させ続けられるか」へと明確に移行している点が、最大の変化であると感じられました。
※「NVIDIA」「NVIDIA Omniverse」「Isaac GR00T」「NeMoClaw」「Isaac Sim」は、米国およびその他の国におけるNVIDIA Corporationの商標または登録商標です。
※「FORRO」「CORLEO」は、川崎重工業株式会社の商標または登録商標です。
※「GitHub」は、米国およびその他の国におけるGitHub, Inc.の商標または登録商標です。
※「Hugging Face」は、Hugging Face, Inc.の商標または登録商標です。
※「Galbot」は、銀河通用機器人(Galbot)の商標または登録商標です。