



技術解説
NVIDIA Cosmos™とは?:フィジカルAIで変わる自動運転とロボット
2025.04.04

サービスクリエーション本部
GPUエンジニア
岡本 朋之
はじめに
生成AIや大規模言語モデル(LLM)の急速な進歩により、テキストや画像を自在に扱う技術は格段に発展しました。しかし、実際に「モノが動く」現場――たとえば自動車やロボット――での高度なAI活用となると、まだまだ課題は山積みです。NVIDIA Cosmos™とNVIDIA Omniverse™では、物理世界と3D環境に視点を広げ、膨大な動画データや3Dシミュレーションを駆使して動的なAIモデル=フィジカルAI(物理AI)を構築する仕組みを提供します。
NVIDIA Omniverse™とは?
NVIDIAが開発した“仮想空間”の構築・シミュレーション基盤。リアルな物理法則や環境を3D上に再現できるため、自動車の走行シミュレーションやロボットの動作テストを安全かつ効率的に行うことが可能。
参考:OMNIVERSE|GPUならNTTPC|NVIDIAエリートパートナー
NVIDIA Cosmos™とは?
“動き”や“力学”を学習するフィジカルAIモデルを構築するための開発基盤。大量の動画データやセンサー情報に基づき、物理法則などを理解するAIを育てることが狙い。さらに上記のOmniverseとの連携により、仮想空間のシミュレーションや合成データ生成が可能。
参考:NVIDIA Cosmos | 世界基盤モデル (WFM) によるフィジカル AI 開発
この記事では、CosmosとOmniverseがどのように自動運転やロボット開発を加速し、実世界での複雑な動きや力学を学習できるフィジカルAIを実現するのかを解説します。また、Cosmosを用いたサンプルシーンの生成を試行してみました。
「テキスト生成や画像認識だけでは捉えきれない、実空間でのインテリジェンスをどう作り上げるのか?」――その答えを探るためのヒントを、本記事のなかで見つけていただければ幸いです。
1 NVIDIA Cosmos™の概要
もし、自動運転やロボットなど、“動くモノ”にAIを活用したいと考えたとき、単に画像やテキストを処理するだけの技術では物足りないかもしれません。そこで注目されているのが、Cosmosです。これは膨大な動画データや物理シミュレーションを組み合わせて、「動き」や「力学」に対応した大規模なAIモデルを構築できるプラットフォームといえます。
例えば、車両間の距離や障害物の存在を高い精度で判定できる自動運転向けのAIモデルや、作荷物のピッキングなど高度なアーム制御技術を持つロボット向けAIモデルなどの学習や構築といった用途が想定されます。
では、Cosmosの何が特別なのでしょうか。大きなポイントとしては、Omniverseと連携することで、実際の動作に近い3D環境を自由にシミュレートしながら、短期間で高精度のAIを育てられることが挙げられます。たとえば、自動運転で危険な道路状況を安全に試せたり、ロボットが複雑な作業を正確に学習したりと、今まで大きなコストとリスクを要していた場面でも、仮想空間で短時間かつ大量に検証できます。これらのメリットから、主に自動運転やロボティクスへの活用が期待されています。ここから先の記事では、Cosmosの活用メリットや、Cosmosの中核にあるモデルの特徴をさらに詳しく見ていきましょう。
1.1 具体的なメリット
Cosmosを使うメリットとしてまず挙げられるのは、実機テストのリスクやコストを抑えられる点です。自動運転車を極寒の雪道で走らせる、ロボットを人が多いエリアで自由に動かすといった危険度の高いシチュエーションは、現実で行うとなると非常に大きなリスクを伴います。実際に人員や機材を動員し、車両やロボットが損傷するかもしれない環境でテストを行うのは、保険費用なども含めて相当な負担がかかります。
しかし、Cosmosを使ってあらゆるシナリオを生成し、連携するOmniverse上のバーチャル空間にテスト環境を置き換えれば、安全かつ低コストで実験を繰り返せます。天候や障害物の配置を変えながら大量のデータを収集し、それをAIモデル学習に利用して、高精度なモデルを作るというプロセスが可能になるわけです。

天候など多種多様な条件を指定してシーン生成が可能
もう一つの大きなメリットは、開発サイクルを格段に短縮できることです。CosmosとOmniverseの連携により、仮想空間でのシミュレーションから学習用のデータ生成までをほぼ一貫して行えます。開発サイクルを高速に回す中で、不具合が見つかればすぐに修正し、新たなデータを生成して再度学習を実施する、という流れを何度も繰り返せるからです。これは特に、自動運転やロボット制御のように細かな動作や安全性が重視される分野で大きな強みになります。実機を用いた試験は非常に時間と手間がかかるため、多種多様なバーチャル空間で徹底的に詰めておくことで、本番テストに入る前のプロセスが大幅に効率化できます。
1.2 World Foundation Models(WFM)の特徴
Cosmosの中核にあるのが、「World Foundation Models(WFM)」です。これは数千万時間を超える動画や9,000 兆個のトークンを土台に、物理的な動きや力学を学習できる大規模なAI基盤モデルです。たとえば、自動車の走行シーンやロボットの稼働シーンなど、時間や環境要因によって刻々と変わるデータにも対応できるのがポイントです。
物理法則を反映したリアルな動きの予測が可能になるため、自動運転やロボティクス、さらには製造業や物流といった分野でも効果的に活用できます。従来のテキストや画像ベースのモデルとは異なり、「モノが動き、衝突し、重力が働く世界」をAIが理解できるわけです。
WFMはテスト用モデルがWeb公開されているため、テキスト(プロンプト)からのシーン生成を簡単に試すことができます。実際に弊社で試した例がこちらです。

WFMで生成したシーンの例。
「運転席の視点/雨天で視界が悪い状態/テールランプ、車体が雨霧で照らされている/一定速度で走行しつつ、他車を追い越し」というプロンプトを投入した結果、概ね意図した内容かつ、物理的にも違和感のないシーンが生成されました。
1.3 オープンモデルライセンス
CosmosのWFMは、NVIDIA NGC CatalogやHugging Faceで公開されており、モデルの商用利用や派生モデル公開も可能なオープンモデルライセンスに基づく提供形態であるという点も魅力です。自社のデータを用いてファインチューニングを施せば、業種や現場ごとのニーズに合わせたAIモデルに育てることができます。また、オンプレミスやクラウドのGPU環境を用いれば、社内ネットワークだけで学習を完結させられるため、セキュリティの観点からも安心です。
2 Omniverseとの連携:Cosmosを最大限に活かす鍵
Cosmosが「動画やセンサー情報を大量に取り込んで、動きや力学まで反映したAIモデルを育てるプラットフォーム」であるならば、その学習に用いるデータをどこでどう作るかが大きな課題となります。ここでNVIDIAが用意したもう一つの大きなピースが Omniverse です。Omniverseは、工場や街並み、ロボットアームの動作など、実世界に近い3D空間をバーチャルに再現できる高精度なシミュレーション基盤です。
2.1 Omniverseで高精度の3Dシミュレーションを生成
Omniverseの特徴は、単に3Dモデルを描画するだけではなく、照明の当たり方や素材の質感、さらには物理法則を考慮した動きまでフォトリアルに再現できることです。雨や雪、風といった気象条件を設定したり、ロボットが物を掴む際の衝突判定を精密に再現したりと、実際に近い環境を作り上げることができます。
たとえば、自動運転を開発しているチームなら、夜間や大雨など危険な条件をOmniverse内で安全に何度もテストできますし、ロボット製造の現場なら、複雑な生産ラインをそっくりそのままバーチャル化して動作を検証できるわけです。
2.2 Omniverseは、Cosmosが活用する“大量データ”の供給源に
では、Omniverseで生み出した仮想空間の情報を、どのようにCosmosが利用するのでしょうか。ポイントは、Omniverseで生成される膨大なシミュレーションデータがすべてAI学習の材料になるという点にあります。雨天の夜道を走るシーン、倉庫でロボットが数センチ単位で荷物をピックアップするシーンなど、現実ではそう簡単に集められないデータを、Omniverseでいくつも用意し、AIモデルが学習することでより多様な挙動をカバーできます。
さらに、Cosmosのシーン生成との連携により、天候・照明・配置物といった条件をランダム化しながらどんどんリアルな合成データを増やせます。Cosmosはこの大規模な合成データを一手に引き受け、短期間で汎用性の高いモデルに仕上げるわけです。
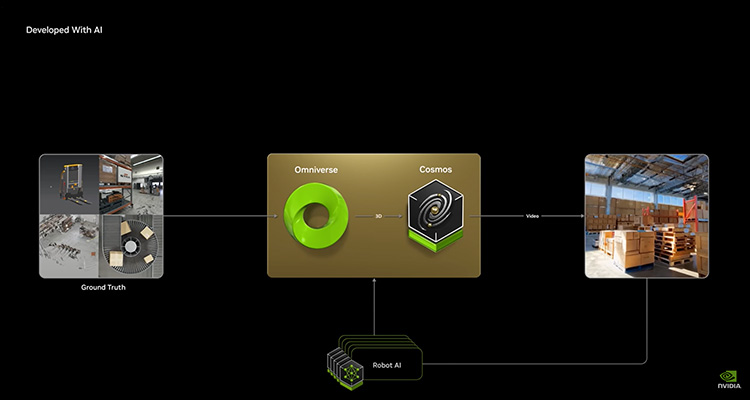
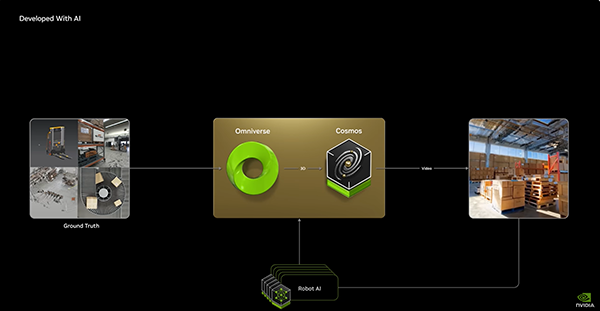
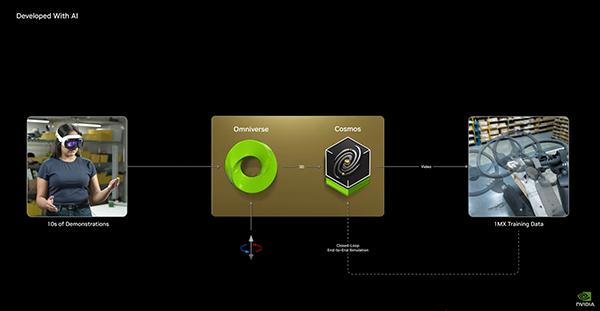
2.3 実空間との往復をスムーズにするワークフロー
OmniverseとCosmosを連携させることで、次のようなワークフローが想定されます。
① Omniverse上でシミュレーション環境を作成
② さまざまな条件下でシミュレーションしたOmniverseのデータを、Cosmosに渡すことで、大量の合成データを生成。このデータを元にAIモデル学習を実行。
③ 学習済みモデルを再度Omniverseの世界に読み込み、仮想空間でどの程度正しく動作するかを評価
④ その結果を実機にも適用し、動作テストを行う
もし実機テストで思わぬ不具合が見つかったら、またOmniverseでシミュレーションを修正してデータを作り直し、Cosmosに学習をやり直させる――こうしたサイクルを短時間で何度でも繰り返せるのが強みです。現実世界だけで行うにはコストや安全面で限界がある試行錯誤を、バーチャルと実機の間を行き来しながら効率よく進められます。
3 自動運転やロボット分野への影響
Cosmosは、物理シミュレーションと大規模学習を融合することで、自動運転やロボットといった“動くシステム”の開発を飛躍的に効率化します。単なる画像認識やテキスト処理にとどまらず、動きや力学、環境変化などのリアルな要素を取り込める点が、これらの分野に大きな影響を与える理由です。
3.1 自動運転の安全性と精度向上
自動運転を実現するためには、複雑な道路状況や気象条件、他車との相互作用など、多角的なデータの学習が不可欠です。しかし、実車で危険な場面を何度も再現するのはリスクとコストが伴います。CosmosとOmniverseを組み合わせた仮想空間ならば、大雨や雪道、夜間の走行、工事中の路面といった実際には試験が難しい状況を安全にシミュレートできます。

Omniverseで道路上のシチュエーションを設定。
こうしたバーチャルデータをCosmosに取り込めば、高精度の自動運転AIモデルを比較的短期間で作り上げられます。たとえば、前方車との車間距離や緊急時のブレーキタイミングなどを繰り返し試すことで、実際に走行する前から多くのケースをカバーできるわけです。特に高速道路や複雑な交差点など、もし現実で失敗すれば重大な事故になりかねない状況でも、仮想空間であれば何度でも安全に実験を重ねられます。
3.2 ロボット開発のスピードアップ
ロボット分野でも、Cosmosは大いに力を発揮します。工場の生産ラインで使われるロボットアーム、配送を担う自律走行型ロボット、さらには家庭内で動くサービスロボットなど、あらゆるシーンをOmniverseで再現し、Cosmosを通じて大規模学習を行うことが可能です。部品のピッキングや組み立て工程において、物の大きさや形状、配置を少しずつ変えながら動作を検証すれば、作業ミスを最小限に抑える制御モデルが得られます。
ロボットアームの反復検証。
また、障害物が多い通路や狭いスペースを動くようなシナリオでも、バーチャル空間で先にテストを行うことで、安全策を十分に練ったうえで実機導入に移せます。倉庫管理などの分野では、ロボット同士や人との接触を避けながら最短ルートを走行するアルゴリズムを、仮想環境でしっかり訓練させられるのがメリットです。
3.3 実機と仮想環境の往復がもたらす効率化
自動運転やロボットの分野では、最終的に実機での検証は欠かせません。ただ、実機テストだけに頼ると、車両やロボットが破損したり、テストコースを占有したりと、膨大な時間とコストがかかります。そこで、OmniverseやCosmosを通じて実行した大規模学習の結果を実機に反映し、問題点が見つかったら再び仮想空間へ戻して改良するという往復を繰り返す方法が効果的です。こうした高速なイテレーションによって、テストと改良のサイクルを格段に短縮できます。
たとえば、自動運転車が予期せぬ状況で対応しきれなかった場合、実機テスト後にそのシーンをOmniverse上で再現し、Cosmosを使って改良版のモデルを学習させるのです。再学習したモデルを再度実機に戻すことで、同じ問題を繰り返さずにすみます。
3.4 今後の可能性
このように、Cosmosは自動運転やロボット開発におけるデータ収集と学習の形を根本から変える存在になるかもしれません。安全性を確保しながら大量のシミュレーションを実行でき、現実では不可能に近い量の試行錯誤をこなせるからです。実際、自動車メーカーやロボティクス企業などでOmniverseやその他シミュレーション基盤を使った開発事例が出ています。将来的にはCosmosと連携するユースケースも登場すると思います。
さらに、家庭用ロボットや公共エリアでのサービスロボットが増えていくにつれ、日常生活に近いシーンのシミュレーション需要も高まっていくでしょう。たとえば、人間が行き交う駅構内をロボットがスムーズに移動するには、動的な障害物回避と混雑状況の把握が欠かせません。そこでもCosmosのようなプラットフォームを使えば、本格的な実験を行う前に仮想空間で十分に検証し、安全策を練ることができます。
まとめ
Cosmosは、大規模AI学習に物理シミュレーションを深く組み込み、実世界での動きや力学をよりリアルに再現しながら学習モデルを構築できるプラットフォームです。画像やテキストといった静的なデータを超えて、自動運転やロボットなどの動的でリスクの高いシーンでも、安全かつ効率的に検証と学習を行う土台を提供している点が大きな特徴といえます。膨大な動画データやセンサー情報をもとにした「World Foundation Model」によって、複雑な環境変化や物理法則に基づくシーン生成や、Omniverseとの連携によるシミュレーションおよび合成データの生成により、短期間で高い汎用性を持つフィジカルAIモデルを育てられるのは、他のプラットフォームにはない強みでしょう。
また、Omniverseとの連携によって、フォトリアルな3D環境の構築やデジタルツイン化が容易になり、多種多様な条件下でのテストを仮想空間内で低コスト・低リスクに実施できます。自動運転のシーンでは猛吹雪や夜間走行など現実的に難しい場面でも試行錯誤でき、ロボットの分野では工場ラインや倉庫内のレイアウトを細部まで再現し、動作を微調整したうえで実機に反映する高速なイテレーションを可能にします。実際の車両やロボットを用いたテストと行き来する形で、シミュレーションと現実のギャップを埋めつつ開発を進められるため、これまでリソースや安全面でネックになっていた問題が大きく軽減されるのです。
導入面においては、一部モデルがオープンソースとして公開されており、GPU環境さえあれば手軽に試し始められる利点があります。企業や研究機関が自社のデータを用いてファインチューニングすることで、独自の要件に合わせた高度なモデルを生み出すことも可能です。
大規模AI学習とリアルな物理シミュレーションが融合したCosmosは、いわば従来のAI技術がカバーしきれなかった“動き”や“力学”の分野を本格的に切り開く存在といえます。自動車業界やロボティクスでの導入事例が増えるほど、より普及が進む可能性があるでしょう。
今回紹介したCosmosが、Omniverseを始めとしたデジタルツイン環境普及のきっかけにもなりえる可能性も感じ、非常にワクワクしています!当社では今後も情報収集や検証などを進めていきたいと考えていますので、興味をお持ちの方はぜひお問い合わせください。
※本記事は2025年2月時点の情報に基づいています。製品に関わる情報等は予告なく変更される場合がありますので、あらかじめご了承ください。NVIDIAが公表している最新の情報が優先されます。