



トレンド
菱洋エレクトロ・リョーサン主催「“ロボットが自分で学ぶ未来を体験” ~実機と仮想環境が融合する次世代のロボット技術~」への参加レポート
2026.03.18

GPUエンジニア
眞砂 諒也

GPUエンジニア
齋木 悠友

GPUエンジニア
山崎 秀徳

1. はじめに
2026年2月13日(金)、菱洋エレクトロ株式会社・株式会社リョーサン主催の
イベント「“ロボットが自分で学ぶ未来を体験” ~実機と仮想環境が融合する次世代のロボット技術~」が開催されました。当社からは4名が現地参加しました。
本記事では、最新の技術トレンドを肌で感じた現地の様子とともに、実機と仮想環境がシームレスに繋がる次世代ロボット技術の最前線をレポートします。
本イベントでは、ロボット市場で活躍する共催企業4社のセミナーと、ヒューマノイドロボットや5本指ハンドの動体展示、デジタルツインとロボティクスの融合によるSim2Realなどの展示が行われました。
本記事では、その中でも特に気になったセミナー・展示の模様を紹介します。
なお、株式会社リョーサンではAIに関するさまざまなイベントを開催しています。イベントスケジュールは下記よりご確認ください。
リョーサンテクラボ イベントページ
2. Prox Industriesが切り拓く「フィジカルAI」とNTTPCが支える計算基盤の重要性
Prox Industries株式会社は、「物理知能(Physical Intelligence)を日本から実装する」というミッションのもと、ロボティクスとAIを融合した研究・開発支援を行うスタートアップ企業です。
単なるアルゴリズム開発にとどまらず、実世界で動き続けるAIの実装を見据えている点が、同社の大きな特徴です。
今回のイベントでは、VLA(Vision-Language-Action)モデル「pi0.5」と、双腕Frankaロボットによる柔軟物操作の実装事例が紹介されました。フィジカルAIが「研究テーマ」から「実装フェーズ」へと移行しつつある潮流が、具体的な形で示されていました。
従来ロボットでは難しかった「柔軟物操作」という壁:
産業用ロボットは、位置や形状が安定した対象物を繰り返し処理することで、自動化を支えてきました。一方で、
- ワイヤーハーネスの配索
- 衣類・布製品の取り扱い
- 把持後に形状が変化する不定形物体
といった柔軟物を対象とする作業は、ティーチングやルールベース制御では対応が難しく、自動化の大きな壁として残ってきました。
Prox Industriesが取り組むフィジカルAIは、「人が教え込む」のではなく、「AIが状況を理解して判断する」アプローチを取ります。pi0.5では、視覚・言語といったマルチモーダルデータを活用し、高レベルな指示理解やタスク分解、状況変化に応じた動作生成を可能にしています。
双腕Franka × VLAによる実証が示す「実装のリアル」
イベントでは、協働ロボットアームFrankaにVLAを実装し、複数物体のピック&プレースやハンカチの折り畳みといった柔軟物操作を実演。3日間連続で安定稼働した点も紹介されました。

ハンカチを折り畳むロボットアーム(NTTPC社員撮影)
その裏側では、大量かつ高品質な学習データの収集、NVIDIA Isaac Sim™/NVIDIA Omniverse™を活用したシミュレーションによるデータ拡張、推論レイテンシや安全性を考慮したモデル設計など、計算資源を前提とした開発・検証ループが不可欠になります。
フィジカルAIでは「モデルが動いた」だけでは不十分で、学習・検証・実機実行を何度も回せるかどうかが成否を分けます。
Prox IndustriesはVLA検証を通じて、タスクの解像度やデータ品質、問題の切り分け方そのものが実装の成否を左右することを説明されていました。タスクの再定義によるテレオペレーションの安定化や、データ・モデル・実機制御を切り分けた原因特定、失敗復帰データの追加によるロバスト性向上といった知見が共有されました。
これらは、フィジカルAIがすでに試行錯誤の初期段階を超え、実装と運用を見据えたフェーズに入っていることを示していると感じました。
今回の講演や展示を通じて強く感じたのは、VLAモデル「pi0.5」のようなフィジカルAIでは、基盤設計の重要性がこれまで以上に前面に出てきているという点でした。単にモデルの精度を高めるだけではなく、学習・検証・実機動作を一体のものとして回し続ける前提で、システム全体を考える必要があると実感しました。
一般的なAIモデルと、フィジカルAI、とりわけVLAモデルが大きく異なるのは、その出力が「文章や画像」ではなく、「ロボットの動き」として現実世界に直接現れる点です。
判断のわずかなズレや環境差が、そのまま動作の失敗や安全面の課題につながるため、一度作って終わりではなく、試して、直して、また動かすというサイクルを、現実的なスピードで何度も回すことが求められます。
そのためフィジカルAIでは、GPU計算に加えて、シミュレーションと実機検証を行き来しながら検証できる環境を、止めずに回し続けられるかどうかが実用性を大きく左右します。
研究から実装、さらに運用へとフェーズが進むにつれて、計算基盤の設計そのものが、技術を「使い続けられる形」で成立させられるかどうかを左右する場面は、今後さらに増えていくと感じています。
NTTPCは、GPUメーカーやOEM各社とのパートナーリングを背景に、GPUサーバー調達から構成設計、冷却、ストレージ・ネットワークまでを含めた基盤構築を担うSIer×VARのハイブリッドとして、こうしたフィジカルAIの特性に対応できる立ち位置にあります。
フィジカルAIを現場で回し続けるための計算基盤を提供することで、その実装と運用を支えていきたいと考えています。
3. 理経~Isaac Simで実現するロボットアームのSim2Real実践~
株式会社理経は、「理想を形に、経験を力に」という理念のもと、ロボティクスとAIを中核に据えた実装志向の技術支援を行う技術商社です。
単なるロボット機器やソフトウェアの提供にとどまらず、Isaac SimやOmniverseを活用したシミュレーション環境構築、Sim2Realを前提としたロボット制御・学習フローの設計など、実機で動き続けるロボットの開発を見据えた支援を強みとしています。
特に製造業や研究機関向けに、ロボット×AI×デジタルツインを組み合わせた検証・実装フェーズまで踏み込む点が、同社の大きな特長です。
今回のイベントでは、Isaac Simを活用したSim2Realの考え方と、ロボットアームでの実践的な技術要素について紹介されていました。
現場開発における課題とSim2Realの必要性
ロボットを実環境で開発・検証する際、次のような課題が存在します。
- 照明、背景、遮蔽、個体差などの条件差が大きい
- 実データだけでは学習・検証用データのバリエーションが不足しやすい
- 安全面やコスト面の制約により、試行回数を増やしにくい
これらの課題を解決するためには、シミュレーション上で多様な条件を再現し、合成データを効率的に生成することが不可欠です。
その多様な条件を再現するためのアプローチとして、シミュレーション由来データと、実環境由来データがあります。
シミュレーション由来のデータは、Isaac Simで、物理挙動を理解したデータ群を生成し、NVIDIA Isaac™ Labで強化学習や模倣学習を用いた大量試行を実施することで生成します。
実環境由来データは、NVIDIA Isaac™ GR00Tにより、実環境データやテレオペレーションからデータを収集し、NVIDIA Cosmos™ Transferで、外観や環境条件を変化させた学習データに拡張させます。
Isaac Simの特徴
Isaac Simの特徴は大きく3つに分けられます。
1つ目は、USDデータ活用による柔軟性と拡張性です。
USD形式でエクスポートすることで、異なるツール間でもデータを統合可能になり、元々異なるCADデータでも、USDを介して一元管理することができます。
2つ目は、NVIDIA PhysX🄬 / NVIDIA RTX™による物理・センサー忠実度です。
Isaac Simでは、PhysXおよびRTXを活用することで、
- 接触、摩擦、剛体挙動などの物理再現
- カメラやLiDARなどのセンサー挙動の高精度再現
が可能です。
この物理・センサー忠実度の高さが、Sim2Realにおける精度向上の重要な要素となります。
3つ目は、実機連携・検証の効率化です。
ROS 2(Robot Operating System 2)ブリッジと呼ばれるロボット開発のフレームワークと連携することで、実機への連携が可能になります。
さらに、メーカー提供のロボット・機器モデルを利用することができるので、検証の効率化も可能になります。
メーカーのロボットデータ公開とURDFの活用
シミュレーション環境の構築には、ロボットの3Dモデルが欠かせません。
国内の多くのロボットメーカーがURDF形式のモデルを公開しています。
URDFは、関節の可動域、慣性、質量などを記述したXML形式のファイルとなっており、STLなどの3Dモデルデータと組み合わせることで、URDFをROS 2やIsaac Simにそのまま導入できます。
CADデータ(.step形式)を使用した、3Dモデルの情報のみが存在する場合でも、URDFに変換することでシミュレーションに活用可能です。
OpenUSDの特長
OpenUSDは、もともと映像・ゲーム分野で活用されてきた技術ですが、現在ではロボティクス分野においても重要な基盤技術となっています。
.USD(メインフォーマット).USDA(テキストフォーマット).USDC(バイナリフォーマット).USDZ(非圧縮ZIPコンテナ)などのさまざまなフォーマットで形成されています。
特徴として
- 非破壊的な編集での追加・修正の容易さ
- 異なるソフトウェアでの相互互換性
- 効率的なコラボレーション
- スケーラビリティ
等があります
これにより、長期的な開発やチームでの協調作業にも適した環境を構築できます。
また、Isaac Simでは、URDFを読み込むとUSDへ変換され、OpenUSDベースの環境で利用できます。
さらにIsaac Sim内でのJointの作成も可能です。講演では、Jointの作成はシンプルな構造の場合に推奨されるという解説がありました。
実環境を再現する3DCG自動生成と照明
実環境を再現する3DCG生成技術として、3DGS(3D Gaussian Splats)というものが紹介されていました。
LiDARなどのセンサーから取得したデータをもとに、実環境を3Dモデルに自動生成できる技術です。
NuRecという、3DGSをIsaac Sim上でレンダリングするための技術もNVIDIAから出ているため、3DGSをIsaac Simに導入することも容易です。
また、Physical Lightを用いることで、カンデラ値を直接入力することが可能になり、実環境に近い照明条件を数値的に再現することが可能です。
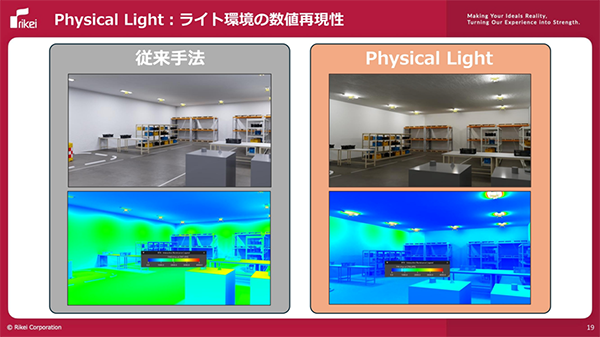
引用:本イベント講演資料「理経_IsaacSimで実現するロボットアームのSim2Real実践」(株式会社理経)
Sim2Realの事例と課題
理経の講演では、Sim2Realの事例が紹介されていました。
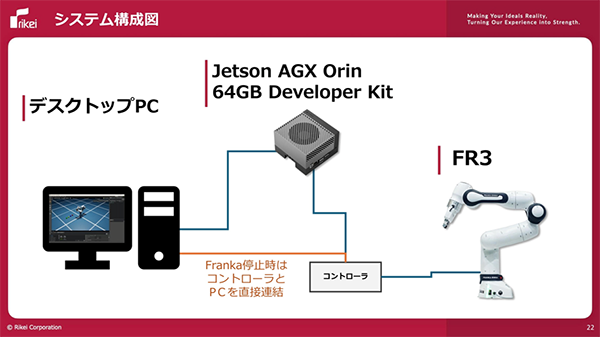
Franka Sim2Real
Isaac Simで物体を操作→操作情報を実機に送る→現実世界で反映という流れで動作させています
引用:本イベント講演資料「理経_IsaacSimで実現するロボットアームのSim2Real実践」(株式会社理経)
理経展示ブース(NTTPC社員撮影)
実機動作を行うことで、技術的な課題が主に2つ分かりました。
① 制御周期のズレ
Isaac Sim(デスクトップPC)での制御周期は10Hz(約0.1秒)、ROS 2(Jetson™)での制御周期は100Hz(約0.01秒)と、制御周期が異なるため、実機の制御周期が10Hzになってしまうというボトルネックが発生してしまいます。
この課題に対しては、ROS 2側でIsaac Simからのデータを元にデータ補完を行うなどのアプローチが検討されています。
② 座標変換によるズレ
Isaac Sim、ROS 2、実機では座標系が異なるため、座標変換が必要になります。
その変換の過程で丸め誤差による軽微なズレが発生する可能性があります。
誤差を完全にゼロにするのではなく、実用上問題ないことを目指し、カメラ映像を用いた模倣学習等での改善案が検討されています
今回の講演を通じて、Sim2Realが「概念」や「研究テーマ」の段階を超え、実機を前提とした設計・検証フローとして現実的に成立し始めていることを強く実感しました。
特に、Isaac Simを中心に、学習・検証・実機連携までを一貫して見据えたアーキテクチャが示されていた点は、実装や運用を意識する立場から見ても非常に示唆に富む内容でした。
Sim2Realの価値は、単に「ロボットをシミュレーションで動かせる」ことにあるのではなく、実環境で起こり得る不確実性を、いかに事前にデジタル上で織り込み、運用に耐える形で設計できるかにあると感じています。
照明条件や遮蔽、個体差といった現場特有の揺らぎを前提とし、それらを合成データとして体系的に扱える点は、今後のロボット実装において欠かせないアプローチです。
また、Isaac Sim、OpenUSD、ROS 2といった技術要素が、特定のツールや構成に依存せず、役割ごとに整理された形で連携している点も印象的でした。
これは、ロボット開発が個別最適な構成から、再利用性や拡張性を前提とした設計へと移行しつつあることの表れだと捉えています。
講演内で示された制御周期のズレや座標変換による誤差といった課題も、Sim2Realが実際に「動かすフェーズ」に入ったからこそ顕在化したものであり、技術が実用段階に差し掛かっていることを示す具体例だと感じました。
理論的な完全一致を目指すのではなく、実用上成立する状態をどう作るかという視点で議論されていた点も印象的です。
今回の講演は、Sim2Realを理想論として語るのではなく、実装を前提とした現実的な議論ができるフェーズに入ったことを実感させる内容でした。
今後、この考え方がどのように広がり、ロボット開発の標準的なアプローチとして定着していくのか、引き続き注目していきたいと考えています。
4. さいごに
本イベントを通じて見えてきたのは、フィジカルAI がもはや「将来の可能性」を示す段階を越え、実際の現場でどのように使い、どのように信頼を積み重ねていくかを真剣に議論するフェーズに入っているという現在地でした。
AI がデータセンターの中だけで完結する存在ではなく、工場や倉庫、ロボットといった現実世界に出て「身体」を通じて動く存在として、本格的に実装段階へと進んでいることを強く実感しました。
イベントで展示されていたAgiBotの二足歩行ロボットに代表されるように、ハードウェアの制御精度や身体の使い方が著しく洗練されており、フィジカルAI が現実世界に適応していくスピードが想像以上に速いことを感じさせられました。

AgiBotの二足歩行ロボット(NTTPC社員撮影)
また、これまでの産業用ロボットが特定作業に特化した存在であったのに対し、言語・視覚・動作を統合的に扱い、導入後も学習を重ねながら対応範囲を広げていくという方向性が、技術として現実味を帯びてきている点が印象的でした。
一方で、参加者の皆様との対話の中で特に印象に残ったのは、「100回中99回成功するシステムを現場はどう受け止めるのか」という、非常に現実的な問いでした。
研究開発の観点では大きな前進であっても、実運用の現場においては「たった1回の失敗」が与える影響は決して小さくなく、大きな事故につながります。わずかな迷いや失敗でも、現場では「リスクがあるなら今の確実な仕組みのままで良いのではないか」という率直な判断につながる――このギャップこそが、フィジカルAI の社会実装における重要な検討ポイントであると感じました。
各社の取り組みを俯瞰すると、フィジカルAI は単一のアルゴリズムやロボットの進化としてではなく、データ生成、シミュレーション、実機展開を前提とした総合的なシステムとして成熟し始めていることが見えてきます。
合成データや Sim2Real による現場条件の吸収、VLA モデルのように言語・視覚・動作を一体で扱うアプローチは、これまで自動化が難しかった不定形作業に対して、具体的な解決の道筋を示していました。
その結果、フィジカルAI の価値は「どこまで賢いか」から、「どれだけ試行錯誤を高速に回し続けられるか」へと軸足を移しつつあるように感じます。
失敗をゼロにすることだけを目指すのではなく、失敗を前提に検知し、復帰し、再挑戦できる仕組みまで含めて設計すること。そして、その継続的な学習と改善を支える基盤や環境こそが、今後の普及と信頼性を左右する重要な要素になっていくと考えます。
また、今回のイベントで最も印象的だったのは、参加者の顔ぶれとその真剣度です。製造業のエンドユーザーからソリューションプロバイダーまで、当初の定員を大幅に上回る応募があり、急遽枠を拡大して開催されたとのこと!この反響の大きさは、ロボット技術やフィジカルAIがいまや単なる「未来の夢」ではなく、現場が切実に「解決したい課題」として捉えられている事実を物語っていました。
フィジカルAI は、不定形な作業の自動化という長年の課題に挑む鍵となる技術です。その可能性を現場に届けるためには、技術の進化と同時に、現場が抱く「1回の失敗」への不安にどう向き合い、どう信頼を築いていくかが、これまで以上に問われていくと感じています。
NTTPC は、こうした挑戦を続ける開発者や現場の皆様を支える存在として、高速な試行錯誤を可能にする計算基盤を提供し、フィジカルAI が着実に社会へ根付いていく未来を下支えしていきたいと考えています。
▶︎ お問い合わせはこちら
※「Franka」はFranka Roboticsの登録商標です。
※「NVIDIA」「NVIDIA Isaac Sim」「NVIDIA Omniverse」「RTX」「PhysX」「Jetson」「NVIDIA Isaac Lab」「NVIDIA Isaac GR00T」は、米国およびその他の国におけるNVIDIA Corporationの登録商標または商標です。
※USDは、Pixar Animation Studiosの商標です。
※「ROS」はOpen Source Robotics Foundation, Inc.の商標です。