工場や倉庫、店舗、インフラ設備などの現場では、カメラや各種センサーが広く設置され、それらから得られるデータを活用した業務改善や自動化が進みつつあります。 しかし、それらのデータを遠隔のGPUサーバーやクラウドに集約して処理する構成では、レイテンシの問題、ネットワークコストの増大、データ持ち出しに関する制約など、現場特有の運用課題と衝突するケースが増えています。
このような背景から、AI推論を現場近くの端末でリアルタイムに実行する「エッジAI」の重要性が高まっており、その中核を担う代表的なプラットフォームの一つが、NVIDIAのエッジ向けコンピューティングモジュール「NVIDIA Jetson™(以下、Jetson)」シリーズです。
本記事では、Jetsonの製品群としての位置づけや構成を解説するとともに、集中処理型のアーキテクチャが現場で成立しにくい理由、Jetsonによる処理分散と全体アーキテクチャの見直し方、さらにPoC(概念実証)から本番運用・多数台展開に至るまでの導入・運用設計の要点を、導入検討者向けに整理して紹介します。
NVIDIA Jetsonとは?リアルタイム推論を現場で実現するエッジAI基盤の全体像
NVIDIA Jetsonは、カメラや各種センサーから得られるデータを現場でリアルタイムに処理するために設計された、小型かつ高性能なエッジAIコンピューティングプラットフォームです。基本的には、GPU/CPU/メモリなどを統合したSystem-on-Module(SoM)と、それを搭載するキャリアボード、筐体、開発キットなどで構成され、用途に応じて柔軟に選択できます。
Jetsonの製品ラインナップは幅広く、推論中心のエントリーモデルから、複数カメラやLiDARなど多センサー入力を前提とした高性能モデルまで揃っており、画像認識・推論・経路計画などのAI処理をローカルで担う構成に対応しています(制御処理はPLCなど他系統と分担するのが一般的です)。ハードウェアは現場組み込みを前提としたコンパクトな設計となっており、工場フロアやロボット内部、屋外エッジ環境など、サーバールーム以外の場所にも容易に組み込めます。

GPU製品・サービス
AI/IoT、デジタルツイン用途に適したGPUサーバーを設計・構築。さらにデータセンター・ネットワークなど、GPU運用に必要なシステムをワンストップで提供可能。
集中処理前提のAIが現場で行き詰まる理由
NVIDIA Jetsonは現場でのリアルタイム処理を目的としたエッジAI基盤ですが、実際のシステム設計では、まず「クラウド側でAI処理を行う構成」を前提に検討されるケースが少なくありません。カメラやセンサーのデータをネットワーク経由で集約し、GPUサーバーやクラウドAIサービスで推論を実行するアーキテクチャは、開発・運用の一元化が容易であるため、初期検討の段階では合理的な選択肢となります。
しかし、現場機器を伴うシステムでは、このクラウド前提の構成が要件と衝突する場面が発生します。ここでは、エッジ側コンピューティングが必要となる背景を、レイテンシ、ネットワーク、データ取り扱いの制約という3つの観点で解説します。
1. レイテンシが業務停止や安全リスクにつながる
現場でAIが扱うタスクの中には、遅延を許容できない業務が少なくありません。
例えば以下のような例が考えられます。
- 生産ライン上の外観検査
- 人の侵入検知
- 自律移動ロボットの障害物回避
クラウドとの往復に伴うネットワーク遅延は、平均値が許容範囲内でも、瞬間的な遅延の増加やパケットロスが重なると、処理が追いつかなくなるケースが現実に起こりえます。このような場面では、「最悪ケースの遅延・欠損」を前提にシステムを設計し、成立する構成を選ぶ必要があるため、Jetsonのような現場常駐型の処理系が有力な選択肢となるでしょう。
2. 映像・センサーのネットワーク負荷とコストがネックになる
映像系AI(例:異常検知や品質確認など)では、複数カメラの映像をクラウドに送信して解析する構成が一般的です。
例えば以下のような制約に直面しやすくなります。
- 高解像度・高フレームレートの映像を複数拠点から常時送信する場合、ネットワーク帯域がひっ迫しやすい
- クラウド側の処理インターフェースや課金構造にも限界がある
- トラフィックが増えるほどネットワークコストも比例して上昇
実務上、全フレーム・全時間帯の映像を常時送信する必要があるケースはまれです。そのため、現場側で一次判定(異常検知や特徴抽出)を実行し、必要な場面のみ詳細映像を送信するといった構成が選択肢となります。
3. データ主権・コンプライアンス要件がクラウド利用を制限する
扱われるデータの中には、外部クラウドに安易に持ち出すことができない情報も含まれます。
例えば以下のようなデータが挙げられます。
- 製造ノウハウが含まれる工程映像
- 顔・音声・生体情報・個人情報を含む画像や数値データ
- 公共インフラの構造情報が推測可能な画像/時系列データ
- 大学や公的機関の研究データ
このような場合には社内オンプレミスや閉域ネットワーク内での処理が現実的な方法となるでしょう。
Jetsonで解決する:エッジとクラウドの役割分担
レイテンシ、ネットワーク負荷、データ主権といった現場特有の制約に対応するには、AI推論をクラウドで完結させるのではなく、処理をエッジ側へ分散する構成が有効です。NVIDIA Jetsonは、この分担を担うためのコンピューティング基盤として位置付けられます。
クラウドやオンプレミスのGPUサーバーを置き換えるものではなく、それらと役割を補完し合う前提で利用されます。
基本的な分担は以下のとおりです。
Jetson(エッジ側)
カメラやセンサーからの入力を直接受け、リアルタイムで推論・一次判定を実行し、その結果を制御系(PLC等)に連携します。
現場の停止やアラートなどのアクションは制御系が担い、Jetsonは「判定を安定して成立させる」役割に寄せて設計すると、構成が安定しやすくなります。
クラウド/データセンター側
大規模学習、集中処理、全社横断のデータ分析、モデル配布・統制などを担当します。数百〜数千台規模の配布・監視・更新や、監査要件を満たす長期保管も上位側が主体となります。
実務上は、映像を常時送信するのではなく、イベント、サマリ、必要最小限の切り出し映像など「上位で必要な情報」に絞って送る設計にすると、ネットワーク負荷と運用コストを抑えやすくなります。
Jetsonの導入検討では、サーバーとの単純な性能比較ではなく、どの処理をエッジ側にオフロードすれば全体として最適化されるかという視点から、アーキテクチャ全体を設計することが重要です。
現場要件に合わせたJetsonシリーズ選定の考え方
Jetsonはシリーズごとに、想定する入力規模や同時処理の前提、設置条件(電力・冷却・筐体)の考え方が異なります。シリーズによってはPoC・プロトタイピング用の開発者キットと、本番導入向けの量産モジュールが用意されており、導入検討の段階によって使い分ける形になります。
現行ラインナップはJetson Thor™シリーズから、Jetson AGX Orin™シリーズ/Jetson Orin NXシリーズ/Jetson Orin Nano™シリーズまで性能レンジ別に構成されており、処理性能と電力レンジが大きいシリーズほど「現場側でまとめて処理する」構成を取りやすく、小型・省電力のシリーズほど「分散配置する」構成に寄せやすい傾向があります。
ここでは、各シリーズがどのような位置づけにあるかを整理します。
| シリーズ | 位置づけ | 想定される構成イメージ |
| Jetson Thorシリーズ | 高性能 | ロボット/多センサー前提の統合エッジ |
| Jetson AGX Orinシリーズ | バランス | 複数カメラ・多入力をまとめる統合エッジ |
| Jetson Orin NXシリーズ | 高性能 | 設置制約の中で入力規模と同時実行を両立 |
| Jetson Orin Nanoシリーズ | 小型・省電力 | 小型・省電力の分散エッジ(軽量推論中心) |
| Jetson Xavier™/TX2/Nano | エントリー〜高性能(旧世代) | 継続利用・段階移行(置き換え/併存) |
Jetson Thorシリーズ
Jetson Thorシリーズは、ロボティクスやマルチセンサー処理を強く意識したJetsonの上位シリーズです。現場側で複合的な処理(認識・推論・周辺処理を含むパイプライン)をまとめて担う構成で扱われます。
統合度が上がるほど、筐体・冷却・電源の前提が設計論点になりやすいシリーズです。
Jetson AGX Orinシリーズ
Jetson AGX Orinシリーズは、Jetson Orinファミリーの上位シリーズです。複数のカメラや多入力を受け、現場側で一次判定をまとめる構成で使われます。
現場側の処理密度を上げるほど、I/O(カメラ・センサー接続)と放熱・筐体設計の整理が必要になりやすい位置づけです。
Jetson Orin NXシリーズ
Jetson Orin NXシリーズは、Jetson Orinファミリーの中位レンジに位置するシリーズです。設置スペースや電源の制約がある環境で、一定の入力規模と同時実行を成立させる構成に用いられます。
台数展開を前提にした現場では、機器実装の共通化や保守性とセットで検討されることが多いシリーズです。
Jetson Orin Nanoシリーズ
Jetson Orin Nanoシリーズは、Jetson Orinファミリーの下位レンジに位置するシリーズです。小型・省電力の条件で、比較的軽量な推論やイベント抽出を現場側で実行する構成に用いられます。
入力条件(台数・解像度・フレームレート)や同時実行の規模によって、想定する構成が変わりやすいレンジです。
Jetson Xavier/TX2/Nanoシリーズ
Jetson Xavier/TX2/Nanoなどの既存世代は、エントリーから高性能レンジまでをカバーする旧世代の製品群です。既設設備での稼働実績が多く、現場の組み込み構成や周辺機器との接続前提が固まっているケースに多く見られます。
モジュールによって提供期限が異なり、販売終了済みのモジュールも含まれるため、長期運用を前提にする場合はライフサイクルの確認が必要です。
次章では、入力条件と現場制約を前提に、モデルと入力要件からグレードを詰める際の進め方を整理します。
Jetson導入を成功させるための設計と運用のポイント
Jetsonは、開発キットによるPoCが行いやすい反面、PoC止まりで終わってしまい、本番運用や多数台展開に進めないケースも少なくありません。ここでは、本番導入を見据えた計画・設計・運用のポイントを、以下の3つのステップに分けて整理します。
モデルと入力要件から決めるJetsonのグレード
Jetsonのモデルをカタログスペックだけで選定してしまうと、実運用時に性能不足やオーバースペックによるコスト過多が発生しやすくなります。
まずは以下のような要素を明確に定義し、それに基づいて適切なグレードを選定することが重要です。
- 接続するカメラ/センサーの台数
- 解像度とフレームレート
- 同時に実行するAIモデルの数とサイズ
- 求められる応答時間(ミリ秒単位のレイテンシ要件)
- 設置可能な電力容量と冷却条件(空冷/ファンレス等)
PoCから本番に進めるための検証と運用要件の織り込み
PoC段階では、動作確認だけでなく、運用性・拡張性に関わる検証も行っておくことで、移行時の手戻りを大きく減らすことができます。
以下を検証しておくと、本番移行時の手戻りを抑えやすくなります。
- 本番相当のカメラ台数/解像度/フレームレートで負荷評価を実施したか
- 判定結果の連携と現場アクション(アラート、停止等)まで含めて試験したか
- ネットワーク障害やクラウド停止時の挙動を確認したか
- モデル更新/ソフトウェア更新の手順をPoC段階で一度通したか
- ハード障害(交換、再起動等)を想定した復旧手順を検証したか
PoCの設計段階から運用要件を織り込むことで、「動作はするが運用できない」状態を回避しやすくなります。
複数拠点と多数台を運用するためのフリート設計
Jetsonのようなエッジデバイスは、1〜2台のPoC段階では手作業での更新や個別設定でも運用が成立します。しかし、運用対象が複数拠点・多数台構成になると、同じ運用手法では限界が生じ、「フリート運用(多数台を一元的に管理・制御する設計)」が不可欠となります。
Jetsonをフリート化して安定運用するためには、次のような観点で事前設計を進めておくことが重要です。
- ソフトウェア/モデルのバージョン管理単位
- 更新方式(コンテナ更新か、イメージ差し替えか)
- ログ/メトリクスの集約先と可視化方法
- 稼働監視/リソース監視の実装レイヤー
- 拠点側で対応する範囲と中央側で一括対応する範囲の切り分け
Jetsonの選定と同等に、運用設計が成否に影響します。検討初期から、Jetsonを単体ではなく「フリート」として設計・管理できる仕組み作りが、本格導入には重要になるでしょう。
利用シーン別に見るJetson活用と構成イメージ
ここまで紹介してきたように、Jetsonは「エッジで推論するだけ」の装置ではなく、現場での即時判定と上位システムでの統合運用を前提とした、エッジAIの統合プラットフォームです。その柔軟な構成力と運用性により、導入先は単一の実証実験にとどまらず、製造・物流・インフラ・ロボティクスなど、さまざまな業界での本番運用に広がりを見せています。
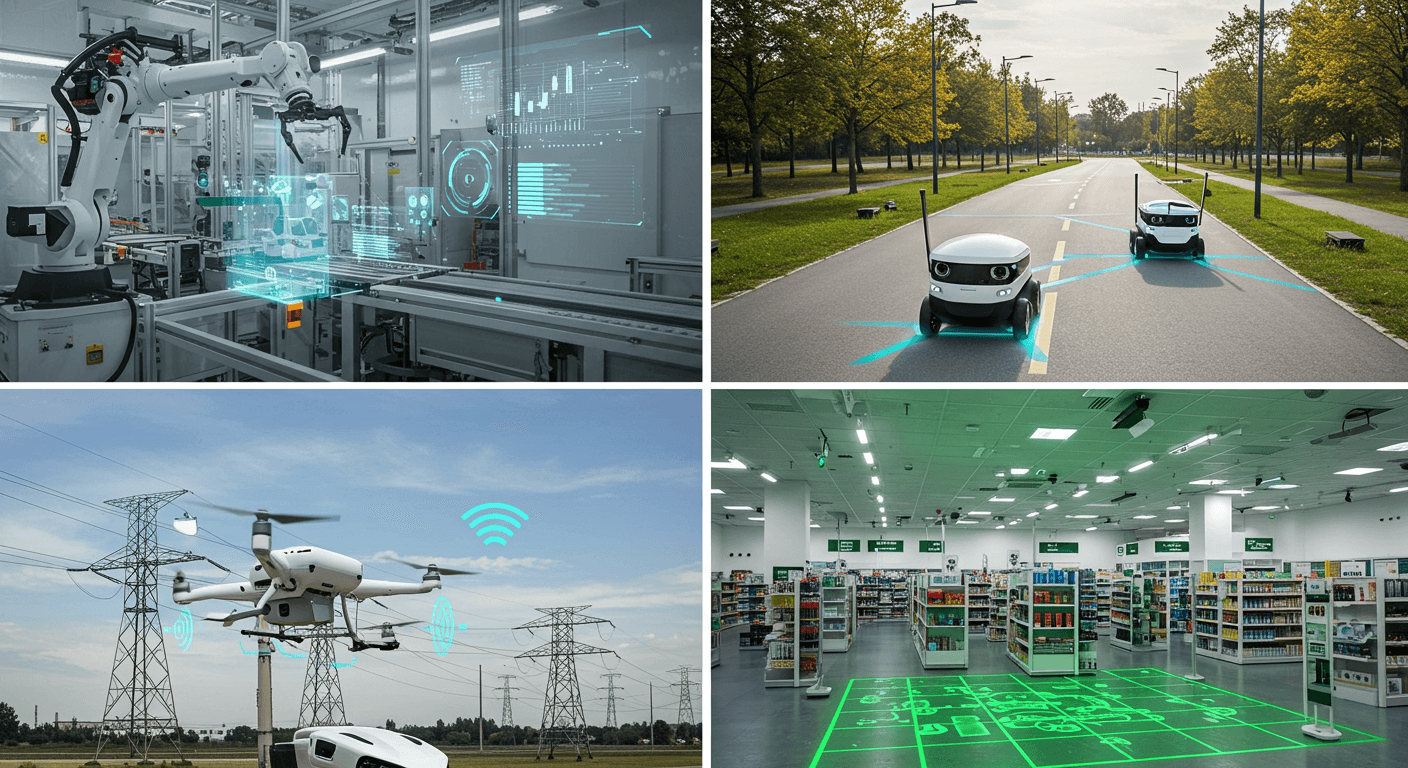
例えば、以下のような領域で導入され、現場とクラウドの役割分担を明確にしたエッジAI基盤として活用されています。
点検・保守の自動化
Kawasaki Heavy Industriesは、NVIDIA Jetson OrinとNVIDIA cuOptを組み合わせた鉄道線路保守システムを構築し、現場での異常検知から保守計画の最適化までを統合的に運用しています。Jetson Orinをエッジ側に配置することで、線路状態の一次判定を現場で完結させ、上位システムでは検知結果をもとにした保守スケジュールの最適化や全体運用を担う構成を実現しています。
参考:Reinventing Maintenance Operations With cuOpt and Jetson Orin
自律移動・ロボット制御
Serve Roboticsは、NVIDIA Jetson Orinを搭載した自律配送ロボットで10万件以上の配送を完了し、99.8%の配送成功率を達成しています。
ラストマイル配送において、周辺認識や障害物回避などの即時判断をロボット内で完結させ、ログ集約・遠隔監視・ソフトウェア更新は上位システムで管理する構成により、現場の自律性とフリート全体の運用管理を両立しています。
参考:How Serve Robotics Achieved 99.8% Success for Last-Mile Autonomous Delivery
Universal Robotsは、NVIDIA JetsonとIsaacプラットフォームを組み合わせた協働ロボット開発基盤を構築し、製造現場でのロボット高度化を加速しています。
ロボット内での周辺認識・判断・制御処理をネットワーク品質に依存させない設計としながら、学習・更新・フリート運用の仕組みは上位側で管理することで、現場の即応性と継続的な改善サイクルを実現しています。
参考:Universal Robots Accelerates Cobot Development With NVIDIA
自律ドローンによる送電設備の点検システム
Exelonは、NVIDIA Jetsonを搭載した自律ドローンによる送電設備の点検システムを展開し、従来1時間かかっていたドローン運用時間を30秒以下に短縮しています。
分散した遠隔拠点で危険兆候の検知と一次判定を完結させ、センター側では可視化・統合・長期傾向分析・計画策定に注力する構成により、ネットワーク品質のばらつきに影響されない運用を実現しています。
参考:Exelon® Leads Utility Innovation With Deloitte in Autonomous Drones for Grid Asset Inspection
スマートスペースの行動計測
XPAIは、NVIDIA Jetson Orinを活用した物理空間の顧客体験測定システムを構築し、店舗や施設における人流・利用状況をGDPR準拠の形で計測しています。
エッジ側で匿名化・特徴量化・イベント抽出まで完結させ、上位には数値化された結果のみを送信する設計により、個人情報保護とネットワーク負荷の両面で最適化された運用を実現しています。
参考:Revolutionizing Customer Experience Measurement
DGX SparkとJetson―「手元のAI基盤」としての違い
Jetsonはエッジ側での推論・一次判定を現場で完結させるためのプラットフォームですが、NVIDIAはもう一つ、デスクトップ環境でAIの開発・学習・推論を一貫して行える「NVIDIA DGX™ Spark(以下、DGX Spark)」というプラットフォームも提供しています。
両者はいずれも小型・省電力なAI基盤ですが、想定される用途と設計思想が異なります。

(関連コラム:AI開発のコストとスピードを両立─NVIDIA DGX Sparkがもたらす新時代のGPU基盤|AIとDXの新しいミカタ。【公式】NTTPCコミュニケーションズ)
Jetsonが工場や倉庫、ロボット内部などの現場に組み込み、リアルタイム推論を担うエッジデバイスであるのに対し、DGX SparkはGrace Blackwellアーキテクチャを搭載し、FP4精度で最大1 PFLOPSのAI性能と128GBの統合メモリを備えたデスクトップAIスーパーコンピューターです。AIモデルの設計からファインチューニング、推論までをローカル環境で完結でき、PoCやプロトタイピングの段階で大規模なクラウド環境を用意せずにAI開発を進めたい場面に適しています。
エッジ側の推論基盤としてJetsonを検討する際、開発・検証フェーズの環境としてDGX Sparkを組み合わせることで、PoC段階から本番展開までを見据えた一貫した開発体制を構築しやすくなります。
DGX Sparkの詳細については、次の製品ページから詳細を確認することができます。ぜひご覧ください。

まとめ
本記事では、NVIDIA Jetsonを活用したエッジAIの導入に向けて、構成の基本、クラウド前提構成が抱える課題、Jetson導入の設計・運用ポイント、そしてPoCから多数台展開までを見据えたフリート設計の要点について解説しました。Jetsonは、工場・倉庫・インフラ・ロボットなどの現場でAI推論をリアルタイムに実行するための基盤であり、クラウドでは対応が難しい制約に応えるアーキテクチャを実現します。ただし、効果を最大限引き出すには、モデル・I/O・電源・冷却・更新・監視・障害対応といった運用要件を、PoC段階から設計に組み込むことが不可欠です。
自社のどの工程・設備にエッジAIが有効か、またクラウドとどのように役割分担すべきかを見極める上で、本記事の内容が参考になれば幸いです。Jetsonを活用したエッジAI基盤の構築、PoC段階からの検証支援、エッジ・クラウド間の役割分担設計など、現場AIシステムの導入をご検討の際は、GPU構築・運用実績を持つNTTPCまでお気軽にご相談ください。

GPU製品・サービス
AI/IoT、デジタルツイン用途に適したGPUサーバーを設計・構築。さらにデータセンター・ネットワークなど、GPU運用に必要なシステムをワンストップで提供可能。
※NVIDIA、NVIDIA Jetson、NVIDIA DGX Sparkは、米国およびその他の国におけるNVIDIA Corporationの商標または登録商標です。